저고도인 궤도 에너지가 낮은 원 또는 타원 궤도에 위성을 발사할 때 우주로켓을 지상에서 직접 발사한다. 하지만 궤도 에너지가 높은 정지궤도와 쌍곡선 궤도에 발사할 때 에너지 효율 측면에서 일단 저고도의 원이나 타원 궤도에 투입한 뒤 궤도를 변경해서 최종 목표 궤도에 투입한다.
위성의 궤도 변경은 (1) 궤도 면내 변경(궤도 경사각을 바꾸지 않고, 궤도의 모양과 크기를 변경)과 (2) 궤도면의 변경(궤도 경사각을 바꾸는 것)을 동시에 하지만, 여기에서는 (1)과 (2)를 따로 생각해서 효율적인 궤도 변경 방법을 생각해보자.
1) 궤도 면내 변경
다음 그림과 같이 저고도의 원 궤도 위성을 가장 효율적으로 같은 면내의 고고도 원 궤도로 전이(轉移)하는 문제를 생각해 보자. 이 문제의 답을 결론부터 말하면, 이 그림의 초기 궤도(Ⅰ)와 목표 궤도(Ⅲ)를 잇는 에너지 효율이 가장 좋은 타원 궤도의 중립을 찾아서 돌아간다. 이런 타원 궤도는 어떤 점(P점)에서 저고도 궤도(Ⅰ)에 외접하고, P점에서 반주(半周)한 A점에서 고고도 궤도(Ⅲ)에 내접하는 타원 궤도(Ⅱ)이다. 이것은 해당 위성이 최소의 에너지(최소 증속도($ \Delta V$))에서 2개의 궤도를 전이하는 타원 궤도를 호만 전이 궤도 또는 호만 트랜스퍼 궤도(Hohmann Transfer Orbit)라고 한다.

실제 위성이 초기 궤도(Ⅰ)에서 목표 궤도(Ⅲ)로 이행(移行)하려면, 우선 초기 궤도(Ⅰ)의 위성이 P점에서 지구의 중력 방향과 직각으로 가속(페리지 킥 Perigee Kick: $ \Delta V_1 $)해서 궤도Ⅱ(호만 전이 궤도)로 넘어간다. 다음에 궤도Ⅱ의 위성이 A점에 이르렀을 때, 지구의 중력 방향과 직각으로 가속(애퍼지 킥(Apogee Kick: $ \Delta V_2 $ )해서 위성이 궤도 Ⅲ로 전이한다. 당연히 2회 증속량( $ \Delta V_1 $ , $ \Delta V_1 $ )은 최적이어야 한다. 이것은 역학 계산으로 가능하다.

왁스윙 아포지 킥 모터
P점은 지구를 도는 호만 전이 궤도(궤도 Ⅱ)의 근지점(Perigee), A점은 원지점(Apogee)을 의미한다. 호만 전이 궤도의 근지점과 원지점에서 2회 가속한 방향이 지구의 중력 방향과 직각이므로, 미소 시간 추력 비행 중의 중력 손실이 ‘0’이다. 그래서 위성은 최소 에너지를 사용하여 저에너지 궤도에서 고에너지 궤도로 이행할 수 있다. 저고도 초기 궤도(I)를 주차 궤도(대기 궤도: Parking Orbit)라고 한다.
위의 예는 호만 전이 궤도를 이용한 어떤 원 궤도에서 다른 원 궤도로 전이하는 것이지만, 어떤 타원 궤도에서 다른 타원 궤도로 전이하는 것은 응용문제이다. 단, 이 경우 비슷한 궤도 변경은 2개의 타원 궤도의 장축 방향이 일치할 때만 가능하다. 2개 타원 궤도의 장축 방향이 일치하지 않을 때는 우선 어느 한쪽의 타원 궤도를 원운동으로 변경한 후에 호만 전이 궤도를 사용하여 궤도 변경이 가능하다.
원 또는 타원 궤도 상의 위성을 저고도 궤도에서 고고도 궤도로 최소 에너지를 사용하여 전이하는 방법은 1925년 독일의 과학자 호만(W. Hohmann)이 제안하였다. 호만 전이 궤도는 정지위성 등을 발사할 때 전이 궤도가 필수지만 전이를 완료하는 데 매우 오랜 시간이 걸리는 것은 단점이다. 반대로 위성을 고고도 궤도에서 저고도 궤도로 전이시킬 때도 에너지 효율 관점에서 호만 전이 궤도가 최적이다. 다만 이때 $ \Delta V_1 $ , $ \Delta V_2 $ 는 가속이나 감속은 아니다.
또한, 우주로켓의 성능과 아울러 생각할 때 고에너지 궤도에 발사하는 위성의 질량을 최대한 키우는 데는 주차 궤도의 고도를 최대한 낮추는 것이 필요하지만 실용상의 최저 고도는 200 km 안팎이다.
2. 궤도면의 변경
실제 궤도 변경에서 상기 궤도 면내의 변경과 함께 궤도면 자체의 변경도 필요하다. 일반적으로 위성의 궤도면(궤도 경사각)을 변경하려면 큰 에너지가 필요하다. 그 원리를 이해하려면 다음 그림과 같이 궤도면을 변경하는 전후에 2개의 원 궤도속도($ V $)가 같다고 생각하고, 궤도 경사각을 $ \alpha $만 변경하는 데에 필요한 가속도를 계산한다. 벡터 계산으로 필요한 속도의 증가량(속도 $ \Delta V$)은 다음과 같다.
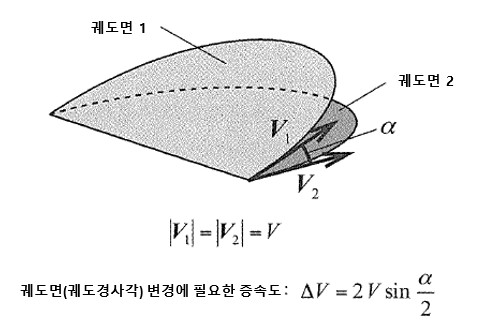
$$ \Delta V = 2V \sin {{\alpha} \over {2}} $$
상기 식에서 에너지가 최소($ \Delta V $가 최소)인 면 변경은 궤도속도($ V $)의 최소점(원지점)에서 실시해야 한다. 이것이 ‘궤도면 변경의 원칙’이다. 엄밀히 말하면 이것은 면 변경 전후에 궤도속도( $ V $ )가 같은 특수한 경우에 성립하지만, 일반 궤도 변경의 지표가 된다. 현실적으로 다네가섬에서 정지위성을 발사할 때 호만 전이 궤도의 근지점과 원지점에서 면내 변경과 면 변경을 수행하지만, 궤도면 변경 90% 이상을 최대한 먼 지점에서 실시하는 것이 최적이다. 어쨌든 위성의 궤도 경사각을 바꿀 때 매우 큰 에너지가 필요하다.
또한, 궤도 변경 시 가속은 큰 추력을 순간적으로 작용시켜서 위성에 작용하는 속도 증가량이다. 실제 엔진 분사 시간은 수십 초 정도가 되기도 하지만 위성의 비행시간과 비교하면 엄청나게 짧다는 것에 유의한다.
[우주로켓] 정지위성이란 무엇인가?
1) 정지위성의 발사 절차정지궤도는 적도 상공 약 36,000 km(정확히 고도 35,786 km; 지구 지름의 약 3배)에만 존재하는 궤도이다. 이러한 고에너지 궤도에 위성을 어떻게 쏘아 올릴까? 만일 직접 발사
sidedesk.tistory.com
'공학 > 우주로켓공학' 카테고리의 다른 글
| 우주선의 궤도는? (0) | 2024.05.31 |
|---|---|
| 정지위성이란 무엇인가? (0) | 2024.05.31 |
| 인공위성의 궤도는? (0) | 2024.05.31 |
| 우주로켓의 비행 방법은? (0) | 2024.05.30 |
| 로켓 제어란 무엇인가? (0) | 2024.05.30 |