우주로켓의 비행 과정을 관찰하자. 구체적인 예로 어떤 우주로켓에서 정지위성 발사 비행을 결정하고, 리프트오프에서 저고도 지구 저궤도(LEO)를 거쳐서 정지 천이 궤도(GTO)에 도달하기까지 비행의 주요 이벤트에 근거해서 관찰한다. 다음 로켓의 주요 사양을 참조하기를 바란다. 주요 이벤트의 경과 시간, 고도, 지표 거리는 공개 데이터로 추정한 것이다.
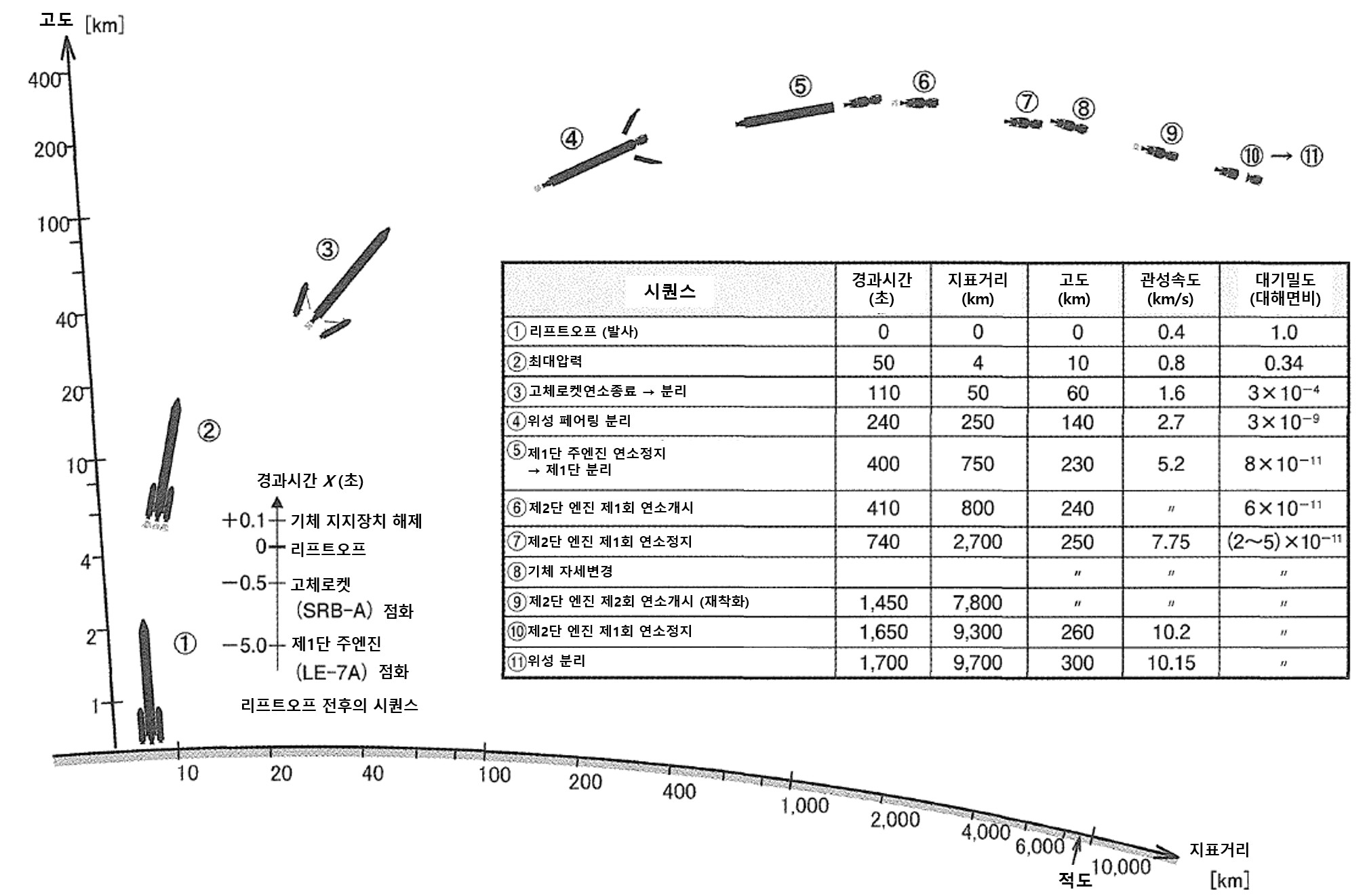
① 리프트오프(Liftoff: 발사)
로켓 전체 단의 조립과 위성 설치 작업을 완료한 우주로켓은 발사대마다 발사점으로 이동한다. 여기에서 모든 단의 기능 점검을 완료한 다음 1단 및 2단 엔진의 액체산소와 액체수소를 충전한다. 그다음 최종 자동 카운트다운에 들어간다. 이하, 주요 이벤트를 발사(리프트오프)의 경과 시간 X(초)를 기준으로 나타낸다.
카운트다운 작업 중에서 가장 중요한 이벤트는 1단 엔진과 고체로켓의 점화이다. 약 (X-5)초, 액체로켓 엔진에 점화하고, 그것이 정상적으로 연소하는 것을 확인한 직후 고체로켓 부스터를 점화한다(약 (X-0.5)초). 고체로켓은 일단 점화하면 도중에 연소를 정지할 수 없으므로 반드시 이 절차를 거쳐야 한다.
현대의 우주로켓은 리프트오프 직전에 어떤 오류가 감지되면 액체로켓의 점화를 멈추고, 고체로켓 점화도 중지하고, 로켓이 지상에서 날아오르는 것을 막는 시스템을 갖추고 있다. 그대로 발사하면 큰 사고가 나기 때문이다. 고체로켓은 점화 과정에서 이런 작은 오류가 일어나도 중지할 수 없다.
1단 엔진과 고체로켓 부스터가 정상적으로 연소를 시작한 직후 우주로켓은 기체와 엄빌리컬 타워의 구속을 해제하고 약 (X+0.1)초에 발사대를 떠난다.
리프트오프 때 액체와 고체로켓의 합계 추력은 우주로켓의 전비 중량보다 커야 하지만, 상승 가속도의 제약으로 추력이 너무 크면 안 된다. 보통 발사 때 전체 추력은 전비 중량의 1.5배 안팎으로 억제된다. 또한, 리프트오프에서 우주로켓의 모든 추진력은 점보제트기가 이륙할 때 추력의 4배를 넘는다.
② 최대 동압
로켓은 기체를 서서히 전방의 비행 방향으로 기울이며, 올라가기 시작한다. 상승 중에 로켓 기체가 받은 외력은 중력, 엔진 추력 및 공기력(양력과 저항)이고, 공기력은 거의 동압(動壓)에 비례한다. 로켓은 구조적으로 횡하중에 약해서 공기 밀도가 높은 대기에서 거의 ‘0’에 가까운 받음각으로 비행하도록 기체를 자세 제어한다. 우주로켓의 비행 조건에서 동압은 고도 10km 안팎에서 최대이다.
동압(動壓): 배, 비행기와 로켓 등 움직이는 물체가 물이나 공기 등의 유체 속을 운동할 때, 반대로 보면 정지한 물체 주위를 유체가 운동하는 것과 같다. 유체의 운동에너지(단위 체적당)에 해당하는 양($ 1/2 \rho V^2 $)을 ‘동압’이라고 한다. 단위는 압력은 ㎩, $ \rho $는 유체의 밀도, $ V $는 유속이다. 보통 선박, 항공기, 로켓이 유체로부터 받는 힘(양력과 저항)의 크기는 ‘동압 × 받음각’에 비례한다.
③ 고체로켓 연소 종료 → 분리
고체로켓 부스터는 발사 직후 짧은 시간에 커다란 추력을 만들고, 무거운 기체를 부양시킨다. 이때 로켓 전체 추력의 약 80%를 고체로켓 부스터가 부담하며, 고도 약 50km를 넘었을 때 연료가 다 타버린 뒤 1단 기체로부터 분리된다. 부스터 2기는 모두 공해상에 투기한다. 이 단계에서 로켓은 고도를 꽤 확보하지만, 획득 속도는 궤도 투입 속도와 비교하면 아직도 매우 작다.
④ 위성 페어링 분리
로켓의 대기권 비행 중, 위성 페어링은 공력 하중, 공력 가열 및 음향 진동으로부터 페이로드를 방호한다. 공기의 영향, 특히 공력 가열의 영향을 무시할 수 있는 고도에 도달했을 때, 페어링을 분리하고 공해상에 투기한다.
⑤ 1단 메인 엔진 연소 정지 → 1단 분리
1단 엔진의 연소가 끝나면, 1단 기체를 분리하면서 부스트 단계를 종료한다. 이때의 고도는 표준 비행으로 200km 정도에 이른다. 이 고도는 대기 밀도가 매우 낮아서 ‘우주 공간의 입구’라고 생각해도 무방하다. 하지만 로켓의 획득 속도가 너무 작아서 인공위성은 실현될 수 없다. 1단 분리로 2단 로켓 기체를 합친 질량은 리프트오프 시의 전비 질량과 비교하면 약 8%이다. 분리된 1단 기체는 공해상에 투기한다.
⑥ 2단 추진체 1차 연소 개시
2단 로켓 기체와 위성은 지표와 국소 수평에 가까운 자세로 가속 비행에 들어간다. 이 단계에서 중력과 대기의 속도 손실은 거의 무시할 수 있다.
⑦ 2단 추진체 1차 연소 정지
2단 기체와 위성은 국소 수평에 가까운 자세로 궤도속도에 도달했을 때, 유도 명령으로 엔진 연소를 정지하고, 지구 저궤도(LEO)에 돌입한다. 이후, 적도 상공에 도달하면 무동력 비행을 계속한다.
⑧ 기체 자세 변경
약 12분의 무동력 비행 중에 기체의 자세를 변경하고, 원운동에서 정지 천이 궤도(GTO) 궤도로 이행하기 위한 준비 작업을 시작한다. 재점화(2단 추진체 2차 연소 개시)할 때 엔진 추력 방향이 적도 위 지표와 국소 수평을 이루도록 미리 2단 가스 제트로 기체의 자세를 변경한다.
⑨ 2단 추진체 2차 연소(재점화) 시작
2단 기체와 위성이 적도 상공에 이르면, 2단 엔진 재점화로 궤도속도를 증가시키고, 원 궤도에서 GTO에 돌입한다.
⑩ 2단 추진체 2차 연소 정지
GTO에 이행하는 데 필요한 속도에 도달하면, 2단 엔진의 연소를 정지한다. 2단 기체와 위성은 GTO 궤도에 도달한다.
⑬ 위성 분리
2단 기체와 위성이 GTO 정상 궤도에 오르면, 위성은 2단 기체에서 분리한다. 2단 기체의 타버린 부분은 위성의 옆에서 GTO 궤도를 무동력 비행하므로 위성과 접촉할 수 있다. 접촉하지 않으려고 2단 기체 탱크에서 잔류 추진제를 방출하여 발생한 반작용력으로 스스로 GTO 궤도를 떠난다.
[우주로켓] 인공위성의 궤도
지구를 도는 인공위성의 궤도는 원 또는 타원 궤도이다. 원 궤도는 지구 주회 궤도의 기본이며, 우주개발에서 가장 많이 이용하는 궤도이다. 다음 그림은 원 운동의 궤도속도(관성속도), 주기 및
sidedesk.tistory.com
'공학 > 우주로켓공학' 카테고리의 다른 글
| 궤도 변경의 원칙은? (0) | 2024.05.31 |
|---|---|
| 인공위성의 궤도는? (0) | 2024.05.31 |
| 로켓 제어란 무엇인가? (0) | 2024.05.30 |
| 로켓 유도란 무엇인가? (0) | 2024.05.30 |
| IMU의 탑재 방식과 항법 계산 (0) | 2024.05.30 |